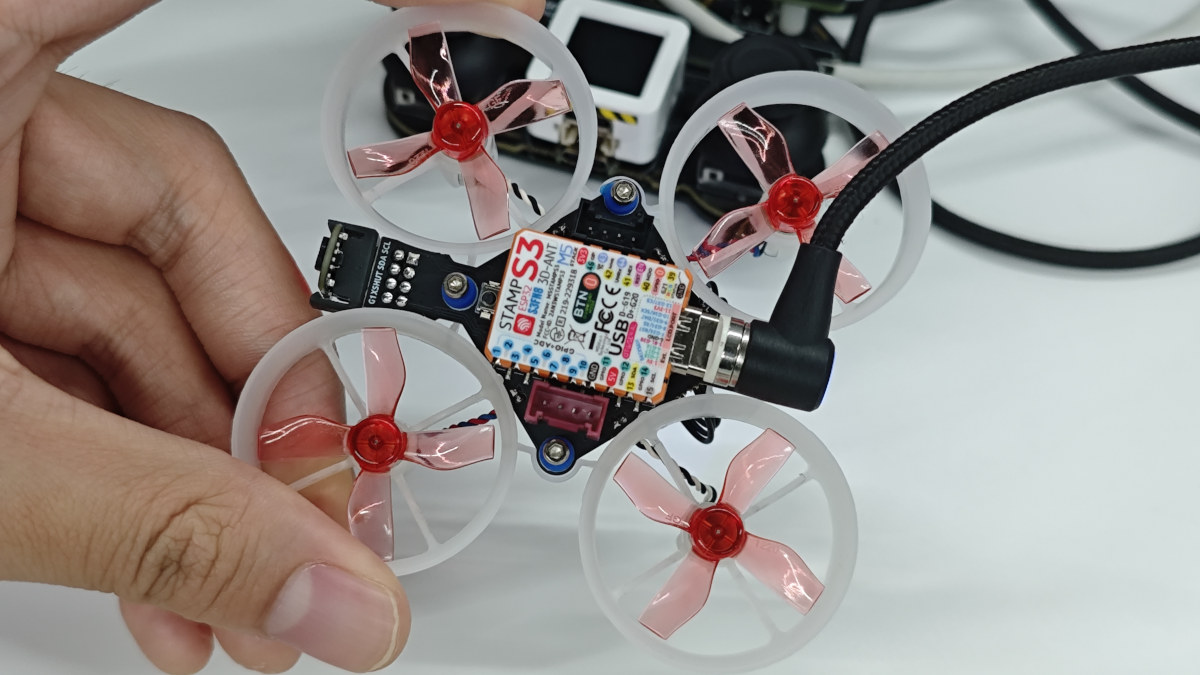
M5Stamp Fly ของ M5Stack เป็นโดรน WiFi ขนาดจิ๋วที่ใช้โมดูล M5Stamp S3 WiFi 4 และ BLE IoT ของบริษัทที่ใช้ ESP32-S3 ซึ่งมีมอเตอร์ 4 ตัวและเซนเซอร์หลายตัว และสามารถควบคุมได้ด้วยจอยสติ๊ก M5Atom WiFi joystick controller โดยใช้ชิป ESP32-S3 WiSoC เช่นกัน เมื่อไม่นานมานี้เราได้เห็นโดรน WiFi ขนาดจิ๋วที่ใช้ ESP32 หรือ ESP8266 เช่นโดรน DIY ที่ใช้ ESP32 และโดรน PiWings 2.0 แต่ M5Stamp Fly เหนือกว่า โดยมีเซนเซอร์ทั้งหมด 6 ตัว ซึ่งได้แก่ Barometer (วัดความดันบรรยากาศ), เซ็นเซอร์วัดระยะทางแบบ time-of-flight 2 ตัว, 6-axis IMU, 3-axis magnetometer และเซนเซอร์ล็อคตำแหน่ง (optical flow sensor) นอกจากนี้ยังมีพอร์ต Grove 2 พอร์ตสำหรับเซนเซอร์หรือโมดูลเพิ่มเติม สเปคของ M5Stamp Fly (K138) : ตัวควบคุมหลัก – โมดูล M5Stamp S3 WiSoC – Es […]
M5Stamp Fly : โดรน WiFi ที่ใช้ ESP32-S3 พร้อมจอยสติ๊ก และใช้โปรโตคอล ESPNOW สำหรับการสื่อสาร