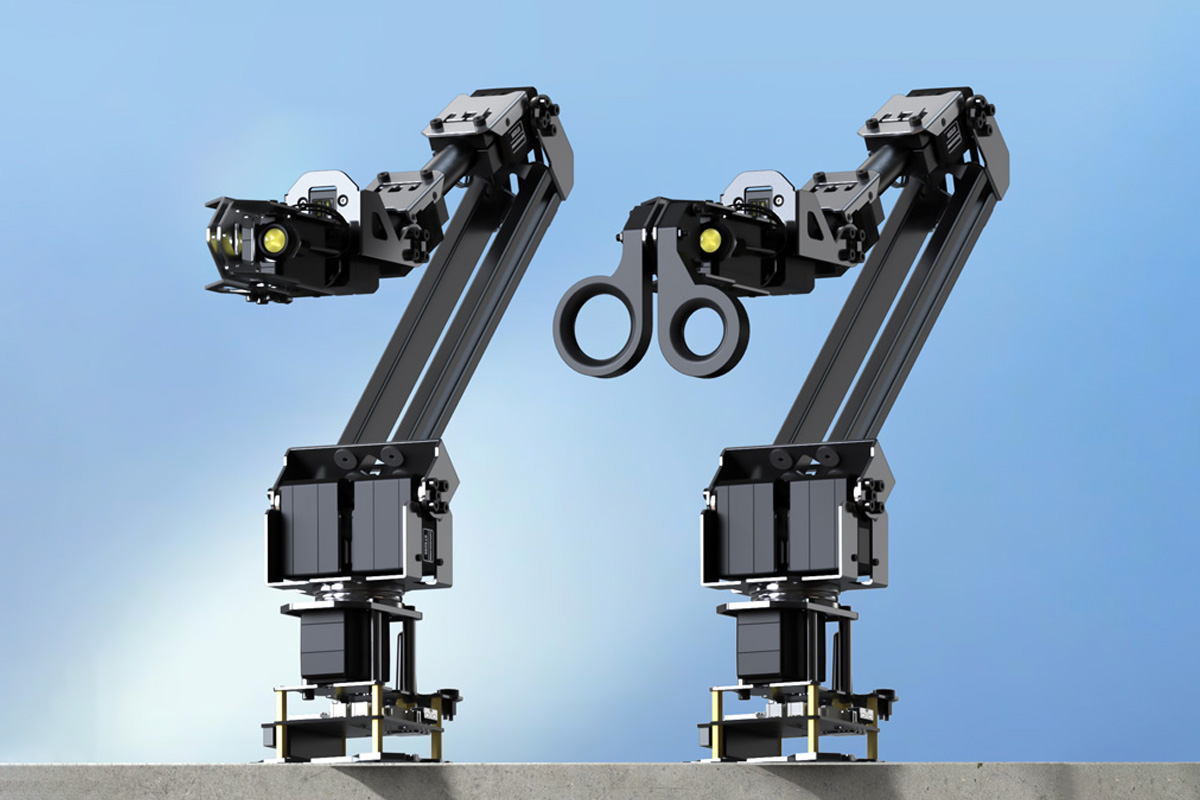
Waveshare ได้เปิดตัว RoArm-M3-Pro และ RoArm-M3-S ซึ่งเป็นชุดหุ่นยนต์แขนกลที่ใช้ ESP32 มีแรงบิดสูงและองศาอิสระ 5+1 (5+1 DOF) โดยความแตกต่างหลักระหว่างทั้งสองรุ่นคือ RoArm-M3-Pro ใช้เซอร์โวมอเตอร์บัส ST3235 ที่เป็นโลหะทั้งหมด เพื่อความทนทานและอายุการใช้งานที่ยาวนานกว่า ในขณะที่ RoArm-M3-S ใช้เซอร์โวมอเตอร์มาตรฐาน ซึ่งมีความทนทานน้อยกว่าเมื่อใช้งานในระยะยาว
หุ่นยนต์แขนกลเหล่านี้มีโครงสร้างน้ำหนักเบา ฐานหมุนได้ 360° รอบทิศทาง และข้อต่อที่ยืดหยุ่น 5 จุด ช่วยให้สามารถทำงานในพื้นที่ 1 เมตร พร้อมรองรับน้ำหนักในการยกของได้ 200 กรัม ที่ระยะ 0.5 เมตร ข้อต่อข้อมือแบบ 2 DOF ช่วยให้สามารถจับวัตถุได้หลายมิติและควบคุมแรงกดได้อย่างแม่นยำ ภายในติดตั้งไมโครคอนโทรลเลอร์ ESP32 รองรับการควบคุมแบบไร้สายหลายรูปแบบผ่านเว็บแอป พร้อมรองรับ Inverse Kinematics สำหรับการกำหนดตำแหน่งที่แม่นยำ, Curve Velocity Control เพื่อการเคลื่อนไหวที่ราบรื่น และ Adaptive Force Control สำหรับการปรับแรงจับอัตโนมัติ การออกแบบเป็น โอเพ่นซอร์ส และรองรับ ROS2 ช่วยให้นักพัฒนาสามารถต่อยอดการใช้งานผ่าน JSON Commands และการสื่อสาร ESP-NOW ระหว่างอุปกรณ์หลายตัว นอกจากนี้ยังรองรับ LeRobot AI Framework สำหรับการพัฒนา AI เช่น การใช้โมเดลสำเร็จรูป, Imitation Learning, และ Reinforcement Learning เหมาะสำหรับโครงการด้านหุ่นยนต์, ระบบอัตโนมัติ และการโต้ตอบระหว่างมนุษย์กับเครื่องจักร
{kind=link}

สเปคของ RoArm-M3-Pro และ RoArm-M3-S:
- Degrees of Freedom (DOF) – 5 + 1
- รับน้ำหนักในการยกของ – 200 กรัม ที่ระยะ 0.5 เมตร
- ระบะพื้นที่ทำงาน – 1,120 มม. (สูงสุด รอบทิศทาง 360°) แนวตั้ง: 798 มม. (สูงสุด)
- ช่วงการทำงาน – ฐาน-360°, ไหล่-180°, ข้อศอก-180°, มือ-135°/270°
- เซอร์โว (Servo)
- เซอร์โวทั้งหมด– 7
- รุ่น RoArm-M3-Pro: ใช้เซอร์โวแบบบัสโลหะทั้งหมด ST3235 พร้อมระบบขับตรง
- รุ่น RoArm-M3-S: ใช้เซอร์โวมาตรฐาน
- ความเร็วเซอร์โว – 40 รอบต่อนาที (RPM) ไม่มีโหลด, ไม่มีข้อจำกัดแรงบิด
- แรงบิดเซอร์โว – 30 กก.ซม. @12V
- เซอร์โวทั้งหมด– 7
- การป้อนกลับจากข้อต่อ – ตัวเข้ารหัสแม่เหล็ก 360° 12 บิต (ความแม่นยำ 0.088°)
- การทำงานของโฮสต์ – การสื่อสาร UART/USB/ESP-NOW/HTTP ผ่านคำสั่งรูปแบบข้อมูล JSON
- จอแสดงผล – OLED ขนาด 0.91 นิ้ว
- รองรับการสื่อสารผ่าน UART/USB/ESP-NOW*/HTTP โดยใช้คำสั่งในรูปแบบข้อมูล JSON
- จอแสดงผล – จอ OLED ขนาด 0.91 นิ้ว
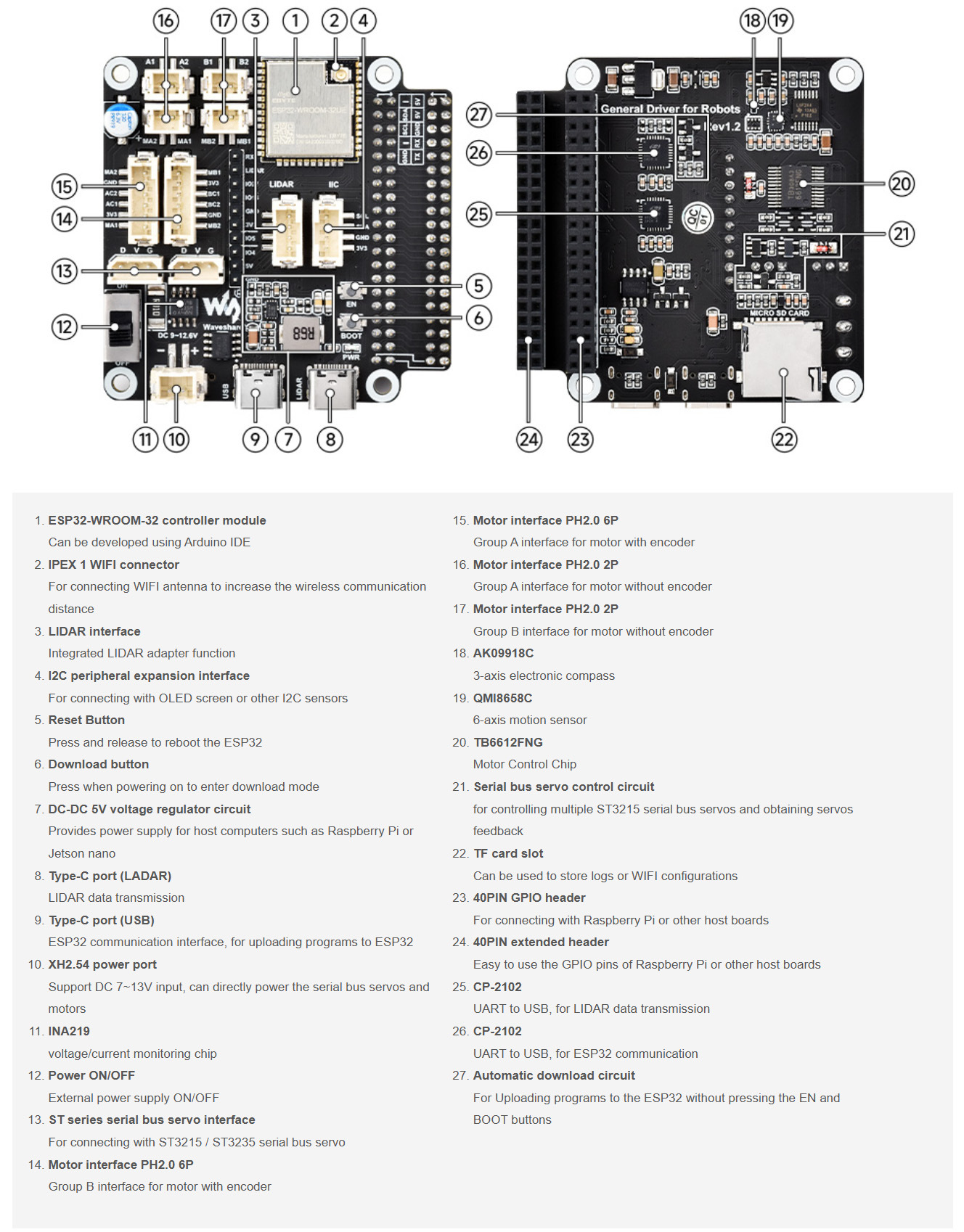
- บอร์ดควบคุม
- MCU: โมดูล Espressif ESP32-WROOM-32U พร้อม WiFi และ Bluetooth
- ที่เก็บข้อมูล – ช่องเสียบ microSD card
- อินเทอร์เฟส
- I2C สำหรับหน้าจอ OLED และเซ็นเซอร์ I2C
- SPI
- อินเทอร์เฟสสำหรับ LiDAR (ไม่ได้ระบุเซ็นเซอร์ที่รองรับ)
- อินเทอร์เฟซเซอร์โวแบบ Serial Bus ST3215
- 2x Motor Interface PH2.0 6P สำหรับมอเตอร์ที่มีตัวเข้ารหัส (กลุ่ม A และกลุ่ม B)
- 2x Motor Interface PH2.0 2P สำหรับมอเตอร์ที่ไม่มีตัวเข้ารหัส (กลุ่ม A และกลุ่ม B)
- Expansion header 40 พินสำหรับเชื่อมต่อกับ Raspberry Pi หรือบอร์ดโฮสต์อื่น ๆ
- GPIO header 40 พิน
- เซ็นเซอร์และ IC
- เข็มทิศอิเล็กทรอนิกส์ AK09918C 3-axis
- เซ็นเซอร์ตรวจจับการเคลื่อนไหว QMI8658C 6-axis
- ชิปควบคุมมอเตอร์ TB6612FNG
- วงจรควบคุมเซอร์โวแบบ Serial Bus ST3215
- ชิปตรวจสอบแรงดันและกระแสไฟฟ้า INA219
- พอร์ต USB
- พอร์ต USB Type-C สำหรับจ่ายไฟและโปรแกรมบอร์ด
- พอร์ต USB Type-C สำหรับการส่งข้อมูล LIDAR
- อื่นๆ
- ปุ่มรีเซ็ต
- ปุ่มดาวน์โหลด
- ปุ่มเปิด/ปิดเครื่อง
- รองรับการจ่ายไฟผ่านพอร์ต XH2.54 พร้อมตัวปรับแรงดันไฟฟ้า DC 5V สำหรับคอมพิวเตอร์โฮสต์ เช่น Raspberry Pi, Jetson Nano
- การขยาย
- การปรับแต่ง EoAT เช่น กริปเปอร์ (gripper) และอื่นๆ
- ขายึดกล้อง
- รางติดตั้งอุปกรณ์เสริม
- แรงดันไฟฟ้าในการทำงาน
- แหล่งจ่ายไฟ 12V, 5A พร้อมสวิตช์จ่ายไฟ 2 ช่อง
- รองรับแบตเตอรี่ลิเธียม 3S (ไม่รวมในชุด)
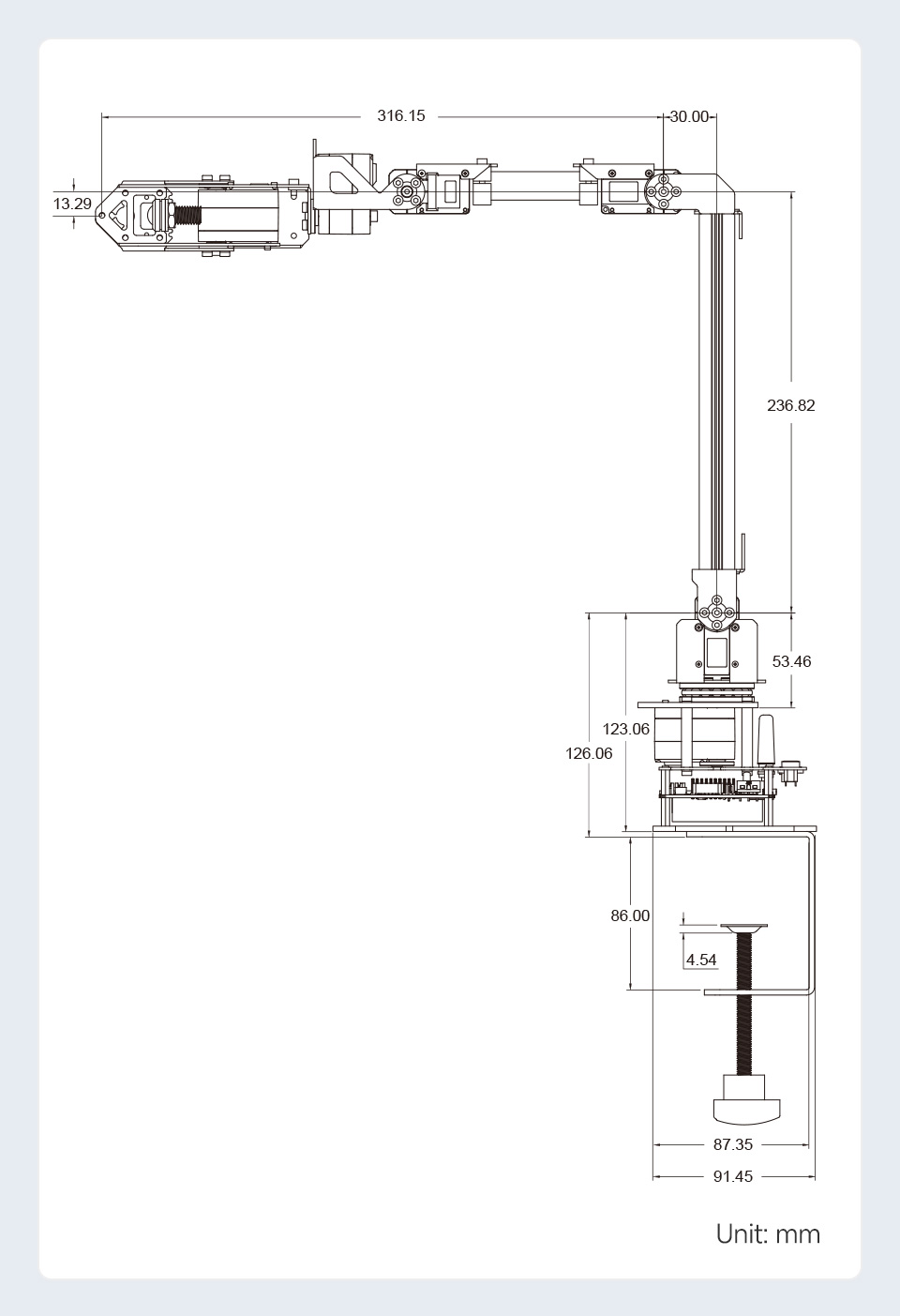
- ขนาด
- การเข้าถึงแนวนอน – 316.15 มม. (ขึ้นอยู่กับการกำหนดค่าแขน)
- ความสูงแนวตั้ง – 236.8 มม. (จากฐานถึงด้านบนของแขน)
- ความกว้างของฐาน – 87.35 มม. ถึง 91.45 มม. (รวมกลไกแคลมป์)
- ความยาวของ End-Effector – 13.29 มม.
- ส่วนขยายแนวนอนเพิ่มเติม – 30.00 มม.
- ความสูงของฐาน – 126.06 มม.
- ความสูงของส่วนฐานที่หมุนได้ – 123.06 มม.
- ความสูงของส่วนแขนเหนือฐาน – 53.46 มม.
- น้ำหนัก
- RoArm-M3-S – 973.5 ± 15 กรัม
- RoArm-M3-Pro – 1020.8 กรัม ± 15 กรัม
- Table Edge Fixing Clamp – 290g ±10g
แคลมป์ End-of-Arm Tool (EoAT) บนหุ่นยนต์แขนกล RoArm-M3 series มาพร้อมกับข้อต่อข้อมือที่มีอิสระ 2 องศา (2-DOF) รองรับการ ก้ม-เงย (Pitch) และการหมุนในแนวนอน ชุดแคลมป์ใช้กลไก ขับเคลื่อนโดยตรง (Direct-Drive) เพื่อให้สามารถควบคุมแรงได้อย่างแม่นยำ ช่วยให้การจับและจัดการวัตถุเป็นไปอย่างเที่ยงตรง แคลมป์รองรับอุปกรณ์เสริมแบบโมดูลาร์ เช่น Mechanical Grippers, เครื่องมือดูดสูญญากาศ (Vacuum-Based Suction Tools) ซึ่งสามารถปรับแต่งให้เหมาะสมกับการใช้งานที่หลากหลาย นอกจากนี้ยังรองรับ LeRobot AI Framework ซึ่งช่วยให้สามารถ คำนวณ Inverse Kinematics (IK), ควบคุมการเคลื่อนไหวด้วย Deep Learning ทำให้แขนกลสามารถวางแผนเส้นทางการเคลื่อนที่และจับวัตถุได้อย่างมีประสิทธิภาพสำหรับระบบอัตโนมัติ
{kind=link}

RoArm-M3 series รองรับเครื่องมือ ซอฟต์แวร์ ไลบรารี และแอปพลิเคชันเว็บสำหรับการควบคุมและการบูรณาการ โดยสามารถทำงานร่วมกับ LeRobot AI Framework เพื่อควบคุมการเคลื่อนไหวผ่าน Inverse Kinematics (IK) และ Deep Learning รองรับการเขียนโปรแกรมด้วย Python, C++ และ ROS2 โดยมี API สำหรับการวางแผนการเคลื่อนที่ (Motion Planning), การรับข้อมูลจากเซนเซอร์ (Sensor Input),การควบคุมการทำงาน (Control) ระบบมาพร้อม GUI แบบเว็บและแบบสแตนด์อโลน สำหรับการควบคุม, คาลิเบรต และวิเคราะห์การทำงาน สามารถทำงานร่วมกับ OpenCV สำหรับงานประมวลผลภาพ, TensorFlow/PyTorch สำหรับ AI-based Object Recognition รองรับการสื่อสารผ่าน MQTT, WebSocket และ REST API สำหรับ ระบบอัตโนมัติทางอุตสาหกรรม และ การตรวจสอบจากคลาวด์ โดยสามารถค้นหาข้อมูลเพิ่มเติมเกี่ยวกับผลิตภัณฑ์ได้ในหน้า wiki แต่ขณะที่เขียนบทความนี้หน้าเพจยังว่างเปล่า แต่บริษัทมีข้อมูลอื่นๆ อีกมากมายที่พร้อมใช้งานในหน้าผลิตภัณฑ์
ก่อนหน้านี้เราได้เขียนบทความถึงหุ่นยนต์แขนกล Waveshare RoArm-M2 รุ่นก่อนหน้า ซึ่งเป็นหุ่นยนต์อีกรุ่นที่ใช้ ESP32 ที่มีอิสระการเคลื่อนไหว 4 DoF และสร้างจาก คาร์บอนไฟเบอร์และอะลูมิเนียมอัลลอยด์ ความแตกต่างหลักระหว่าง RoArm-M2 และ RoArm-M3 คือรุ่น RoArm-M3 มีอิสระการเคลื่อนที่ 5+1 DoF (Base, Shoulder, Elbow, Wrist Pitch, Gripper และ Wrist Rotation), รุ่นใหม่สามารถ หมุนข้อมือได้ (Wrist Rotation, 1 DoF) ทำให้กริปเปอร์หมุนในแนวนอนได้, ช่วยให้ควบคุมการจับวัตถุได้แม่นยำขึ้นเหมาะกับงานที่ซับซ้อน เช่น การหยิบจับที่แม่นยำ, การควบคุมวัตถุ และแอปพลิเคชันด้าน AI
หุ่นยนต์แขนกล Waveshare RoArm-M3 series ที่ใช้ ESP32 พร้อม 5+1 DoF วางจำหน่ายบน AliExpress รุ่น RoArm-M3-S ราคา $331.39 (~11,000฿)และรุ่น RoArm-M3-Pro ราคา $455.99 (~15,000฿)
{kind=link}

แปลจากบทความภาษาอังกฤษ : Waveshare ESP32 robotic arm kit with 5+1 DoF supports ROS2, LeRobot, and Jetson Orin NX integration

บรรณาธิการข่าวและบทความภาษาไทย CNX Software ได้มีความสนใจในด้านเทคโนโลยี โดยเฉพาะ Smart Home และ IoT